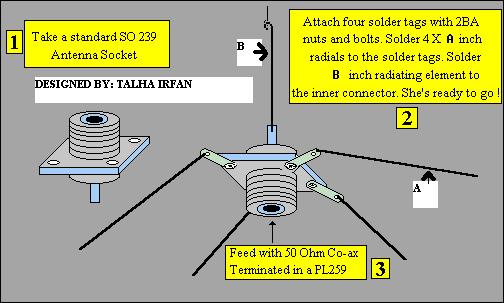
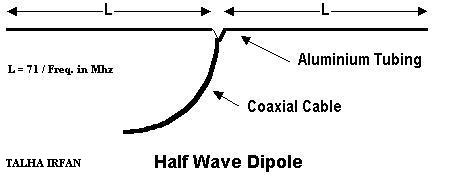
It accepts load from 75 ohm source and has much smaller power output than Ground Pole Antenna. Use this antenna only when you don't have GP Antenna.
Construction: Two aluminum rods ,each of length "L" in meters are joined together through an insulator as shown in fig. From center, 75 ohm cable is feeded just like ordinary TV antenna.
Posted on Sunday, May 2, 2010 • Category:
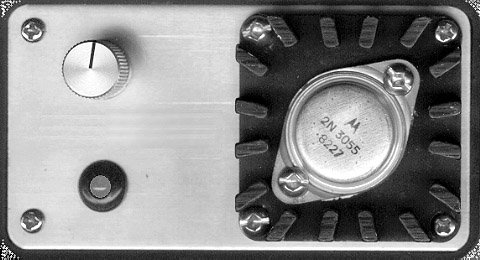
Battery Chargers
The electric model aircraft and car industries have produced a bewildering array of field chargers for NiCd motor battery packs. These range from simple 6 or 7 cell chargers consisting of a resistor and mechanical timer, to more complex chargers with peak detection, cycling, and the ability to handle 36 cell packs.
Posted on Sunday, May 2, 2010 • Category:
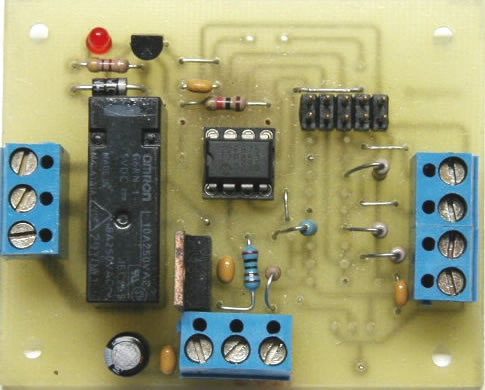
Sensors
The basic theory behind the Parking Assistant is the Sound Navigation and Ranging (SONAR) technique that is used for finding the distance and direction of a remote object underwater by transmitting sound waves and detecting reflections from it. First, a series of short ultrasonic pulses are transmitted using a transducer that changes voltage into sound waves. The transmitted pulse is reflected off an object, and the reflected wave is then received by another transducer that converts sound waves into voltage. The transmitted signal is also known as the ‘ping’ and the received signal is known as the ‘pong’. By counting the elapsed time between the ping and the pong, the distance between the device and an object can be easily calculated by multiplying the elapsed time with the speed of sound.
Posted on Sunday, May 2, 2010 • Category:
Antennas

A simple dipole antenna can be used for improved FM broadcast signals. A dipole is basically a length of conductor (wire) split into two portions and signal is taken off at the split. It has a nominal 3 dB gain over an isotropic source and is directional, tending to favor signals broadside to the wire. The dipole is customarily an electrical half wavelength of wire at the frequency of interest, since the impedance under this condition is theoretically 72 ohms resistive and is a good match to a 50-75 ohm source or load generally presented by interfacing equipment such as receivers and transmitters designed to work into this range of impedances.
Posted on Sunday, May 2, 2010 • Category:
PIC
This project uses the 12F675, it was chosen because of its low cost, A/D convertor and flash memory. This security system was designed to be used in a simple installation with just a hidden switch and not a keyboard. There are several features such as a battery monitor built into the code that also make it good for remote locations just run off a battery. Also all the delays and and other parameters are put into flash memory just by using a visual basic program and the serial port of a PC.
Circuit-Zone.com © 2007-2026. All Rights Reserved.