Circuit-Zone.com - Electronic Projects
Posted on Tuesday, October 5, 2010 • Category: FM Radio / Receivers

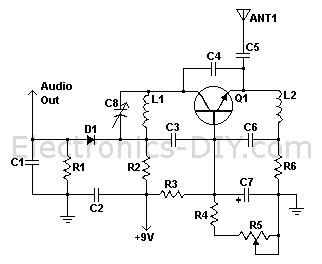
This simple fm radio receiver circuit consists of a regenerative rf stage, TR1, followed by a two of three-stage audio amplifier, TR2 to TR4. In some areas 3 stages of audio amplification may not be necessary, in which case TR3 and its associated components can be omitted and the free end of capacitor C5 connected to the collector of TR2.
Posted on Tuesday, September 21, 2010 • Category: Test and Measurement
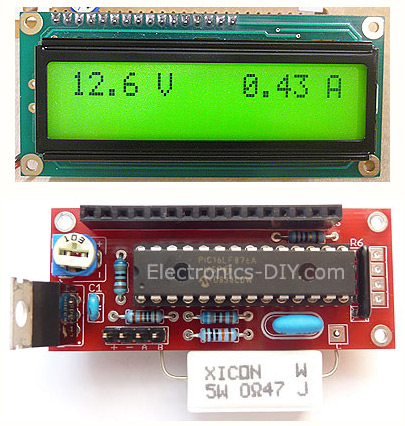 PIC Voltmeter Amperemeter can measure voltage 0-70V or 0-500V with 100mV resolution and current consumption 0-10A or more with 10mA resolution. The meter is a perfect addition to any power supply, battery chargers and other electronic projects where voltage and current must be monitored. The meter uses PIC16F876A microcontroller with built-in ADC (Analog to Digital Converter) and 16x2 green backlighted LCD display. With slight modification it is possible to measure higher voltage and current.
Posted on Wednesday, September 15, 2010 • Category: FM Transmitters
 A amplifier of medium force RF for the FM, is always essential for the amateur that wants it strengthens some small transmitter, that likely it has already it manufactured! The present circuit can give force 25-30W, with control no bigger than 4-5 W.
As it appears in the analytic drawing, the amplifier is manufactured with the transistor TR1 of type LY89 of Phillips. The transistor this is specifically drawn for operation in frequencies up to 175Mhz, with very good results.
Posted on Tuesday, September 14, 2010 • Category: FM Transmitters
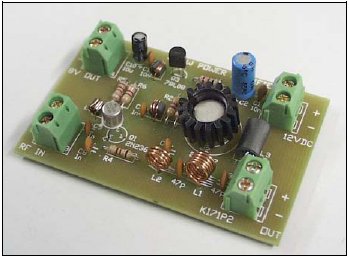 This project is a simple 2-transistor VHF power amplifier, with about 16dB gain, and requires no tuning or alignment procedures. Wideband techniques have been used in the design and the circuit is equipped with a "lowpass" filter to ensure good output spectral purity. The project has been designed for assembly on a single-sided printed circuit board. The circuit is specifically designed to amplify the output of 7mW to 10mW WBFM transmitters (wide band) to a final level of 250mW to 300mW.
Posted on Saturday, September 11, 2010 • Category: Headphone Amplifiers
 The small AF amplifier Suitable for laptops and MP3 players. IT may be powered from the PC (Game or USB) or AC adapter.The basis of the amplifier is an integrated circuit TDA2822M. With this circuit you can build an amplifier with output up to 2x 1 W. This high power circuit is only able to supply at peak times, when excited, would be permanently unable to work. Involvement of the amplifier is to figure 1. The input signal passes through frequency-dependent volume control on the divider. Frequency-dependent divider produces frequencies around 100 Hz, with a positive influence on the subjective sound quality when using small speakers. IO is the involvement of manufacturers' recommendations. The amplifier output can connect speakers with an impedance of 8 ohms (or greater), or headphones. IO supply voltage can be in the range of 1,8 to 15 V. The low supply voltage power amplifier is very small, at high supply voltage and load speakers with low impedance circuit may be a little overheated. With 8 ohm speakers are suitable voltage in the range of 6-9 V. I used to supply voltage 5 V, which are derived from the game port. Voltage of 5 V can be obtained even from the keyboard connector, PS / 2 port and USB. A better option is a network adapter, there are no problems with earth loops.
Posted on Saturday, September 11, 2010 • Category: FM Radio / Receivers
 The communications between commercial aircraft and the ground can be interesting, amusing and sometimes even disturbing. However radios that receive the approximately 220MHz to 400MHz band commonly used for aircraft (both military and commercial) are not easily found. And scanners can be complicated, large and expensive. With an easy to build circuit such as this one, everyone can enjoy listening in on these conversations.
Posted on Friday, September 3, 2010 • Category: FM Transmitters
 5W PLL Stereo FM Transmitter features PLL synthesized drift free operation with high quality BH1415 chip. 5W RF output power is achieved with 2SC1971 6W transistor in the output stage. Front panel digital control comes with LED display and case is made high quality aluminum. The board features EMI filtering on audio and power inputs and comes with Microphone and Audio inputs. Once transmitter is turned on it starts broadcasting with previously selected frequency. Overall this 5W PLL Stereo FM Transmitter provides professional broadcast audio quality and rivals commercial broadcasts.
Posted on Friday, September 3, 2010 • Category: FM Transmitters
 This is a unique FM transmitter that provides both a built-in sensitive microphone and an RCA jack for line input. It has two modes of operations, "Microphone" and "Line", which are selectable using a jumper. In the "Microphone" mode, it can be used as a wireless microphone transmitter. In the "Line" mode, it can be easily connected to any audio source to broadcast the audio signal to any FM receiver within its range. 500mW FM / VHF Transmitter Amplifier / Booster can be added for longer transmission range.
Posted on Friday, September 3, 2010 • Category: FM Transmitters
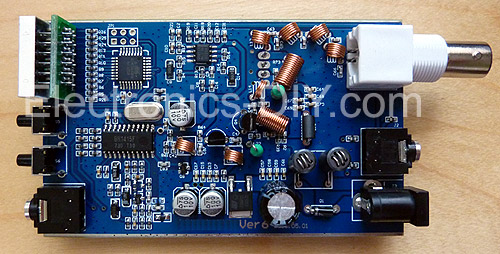
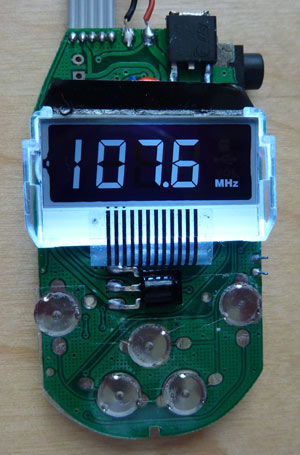 Features PLL tuned transmitter / exciter for rock solid frequency stability over the entire FM band. Displays Transmitted Frequency on backlighted LCD. PCB includes antenna output to which a piece of wire, or VHF amplifier can be connected for greater transmission range. Includes 3.5mm audio jack cable. Plays MP3 from SD and USB memory (SD and USB connectors on board). IR Remote can be used to control the transmitter.
Posted on Friday, September 3, 2010 • Category: FM Transmitters
 This is a high quality stereo PLL FM transmitter incorporating a Phase-Locked-Loop (PLL) synthesizer. It is based on the Rohm BA1417 PLL FM Transmitter Integrated Circuit and offers a choice of up to 14 preset transmission frequencies spaced every 200 KHz between: 88.7 – 88.9 MHz (Low Band Mode) and 106.7 – 107.9 MHz (High Band Mode). It has outstanding frequency stability thanks to the PLL crystal controlled design and offers excellent high-fidelity audio performance.
It is ideal for use in your home or office to transmit MP3 songs or internet radio stations from your computer to any standard FM radio. It can also be connected to any other audio source, such as an iPod, a MP3 Player, Walkman, Discman or XM Satelite Radio receiver.
The circuit incorporates a stereo audio input jack as well as a DC adapter jack which makes it quick and easy to setup. Transmission frequency selection is done through a DIP switch.
Circuit-Zone.com © 2007-2026. All Rights Reserved.
|
|
|