Circuit-Zone.com - Electronic Projects
Posted on Friday, November 12, 2010 • Category: Power Supplies
Amateur radio has been somewhat slow to accept switching power supplies for powering communication equipment. This is a pity, because "switchers", as they are often called, offer very attractive features, like small size, low weight, high efficiency, and low heating. True, they are generally more complicated than linear power supplies, but this is easily compensated by the fact that they can be built for a lower cost.
Some early switchers produced an objectionable amount of RF noise, bringing the whole switching technology into bad reputation. But by proper design techniques and careful EMI filtering it is possible to build very quiet switchers.
Posted on Friday, November 12, 2010 • Category: Miscellaneous
 With increased dependency on electric power for various domestic, commercial purposes and the seemingly declining capacity of power utilities in many countries, the need for additional backup power sources is on the rise. Various modules are already available to address these different needs. However, most modules are too expensive, too bulky, or too rigid in their power capacity, capability, and flexibility.
The circuit described here is an off-line uninterruptible power supply. It has an expandable power stage design that can be easily modified for use with power ranges from as low as 100 W to as high as 5000 W with forced cooling.
Posted on Friday, November 12, 2010 • Category: Battery Chargers
 The following automatic battery-charger design is created with a circuit that could qualify as the simplest window comparator ever built around a single transistor. It starts charging when the battery voltage drops beyond a preset value, and it stops when an upper preset voltage is attained.
With the help of a precise variable voltage supply, the upper and lower voltage levels were set. The normally connected (NC) lead of the relay isn't joined to the 15-V dc supply, which blocks this voltage from passing to the battery leads. This will accurately set the upper and lower levels. But the charging supply of 15 V dc was connected to the circuit.
Posted on Tuesday, November 9, 2010 • Category: Counters / Frequency Meters
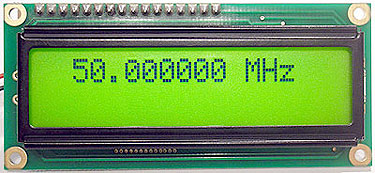 This is 60MHz Frequency Meter / Counter for measuring frequency from 10Hz to 60MHz with 10Hz resolution. It is a very useful bench test equipment for testing and finding out the frequency of various devices with unknown frequency such as oscillators, radio receivers, transmitters, function generators, crystals, etc. The meter provides very stable readings and has excellent input sensitivity thanks to onboard amplifier and TTL converter, so it can even measure weak signals from crystal oscillators. With the addition of prescaller it is possible to measure the frequency of 1GHz and above.
Posted on Thursday, October 21, 2010 • Category: Miscellaneous
 Not properly closing a refrigerator door will no doubt invite huge electricity bills. This gadget is an alert device that beeps if you leave the refrigerator door open for more than 20 seconds. When the door opens, the lamp illuminates and the IC (a 4060B counter/oscillator) starts counting down. After a preset delay of 20 seconds, the piezoelectric buzzer beeps intermittently for 20 seconds and then stops for the same amount of time. This cycle repeats until the refrigerator door closes.
Posted on Thursday, October 21, 2010 • Category: Motor Controllers
 In applications requiring absolute accuracy in the speed control of dc servo motors, there’s no substitute for the traditional tachometer-based feedback loop. But for somewhat less demanding situations, adequate accuracy often can be achieved without the complication and expense of a tach. This can be done by taking advantage of the built-in electromechanical constants of the motor itself.
Posted on Thursday, October 21, 2010 • Category: LED
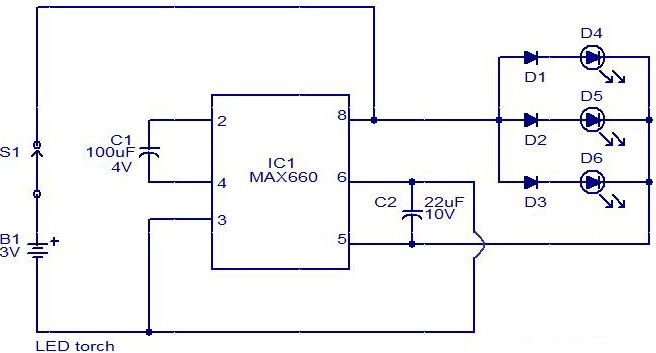 This is a simple LED torch circuit based on IC MAX660 from MAXIM semiconductors. The MAX 660 is a CMOS type monolithic type voltage converter IC. The IC can easily drive three extra bright white LEDs. The LED's are connected in parallel to the output pin 8 of the IC. The circuit has good battery life. The switch S1 can be a push to ON switch.
Posted on Thursday, October 21, 2010 • Category: Battery Chargers
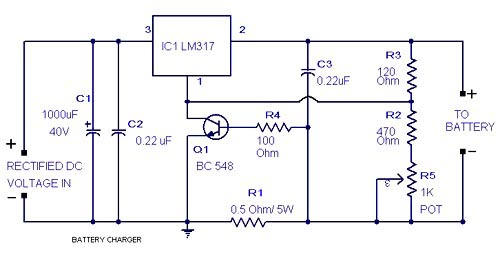 Here is a lead acid battery charger circuit using IC LM317.The IC here provides the correct charging voltage for the battery. A battery must be charged with 1/10 its Ah value. This charging circuit is designed based on this fact.The charging current for the battery is controlled by Q1,R1,R4 and R5. Potentiometer R5 can be used to set the charging current. As the battery gets charged the the current through R1 increases.
Posted on Thursday, October 21, 2010 • Category: Power Supplies
For circuits using TTL ICs the supply voltage is a great concern and a slight increase in supply from the rated 5V may damage the IC. Using fuses alone does not solve the problem because a fuse may take several milliseconds to blow off and that’s enough time for the IC to get damaged.
Posted on Thursday, October 21, 2010 • Category: Miscellaneous
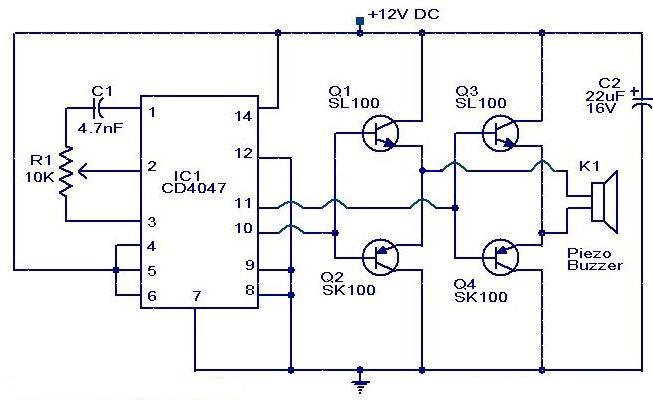
Here is the circuit diagram of an ultrasonic mosquito repeller.The circuit is based on the theory that insects like mosquito can be repelled by using sound frequencies in the ultrasonic (above 20KHz) range.
Circuit-Zone.com © 2007-2026. All Rights Reserved.
|